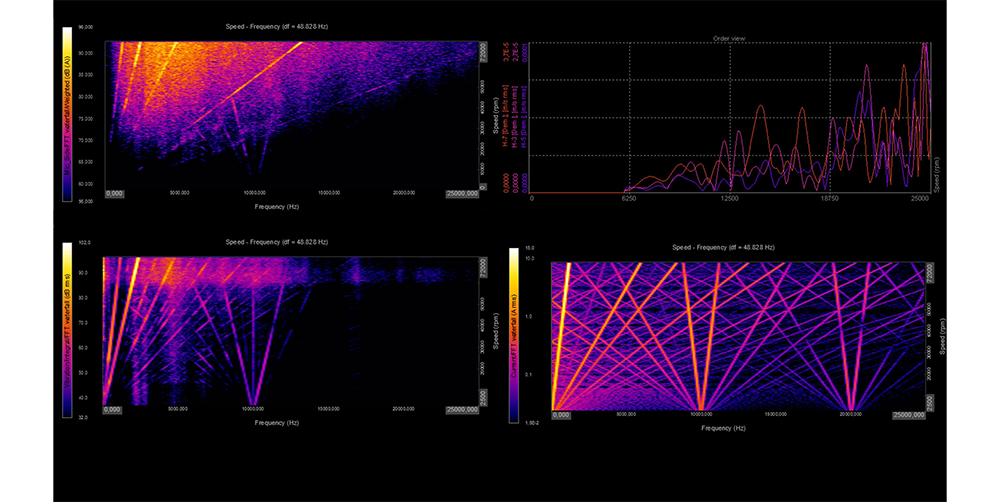
ねじり振動や回転振動は、回転シャフトの問題や故障の原因となることがよくあります。 当社の回転およびねじり振動解析とオーダートラッキング解析の組み合わせは、自動車,産業,発電アプリケーションの回転シャフト,クランクシャフト,ギアのトラブルシューティングに最適なツールです。
ねじり振動とは物体の角振動であり、通常はシャフトの回転軸のことです。これは、回転シャフトの安定した回転速度に重畳される、時間的に変化するトルクによって引き起こされる機械振動です。自動車工学では、ねじり振動は主にエンジン出力の変動によって引き起こされます。
ねじり振動は、回転周期内の回転速度の変化として評価されます。回転数の変動は、通常、粗い駆動トルクまたは変動する負荷によって引き起こされます。
回転振動は単に回転速度の動的成分です。シャフトの回転速度を高精度で計測すると、ランナップのいくつかの領域で回転速度の偏差が大きいことがわかります。これは、角振動がシャフトの角固有振動数を超えるために起こります。回転速度または回転角の直流成分をカットして算出します。
ねじり振動のレベルは材料特性や温度,負荷,回転数などの動作条件など、多くのパラメータに影響されます。
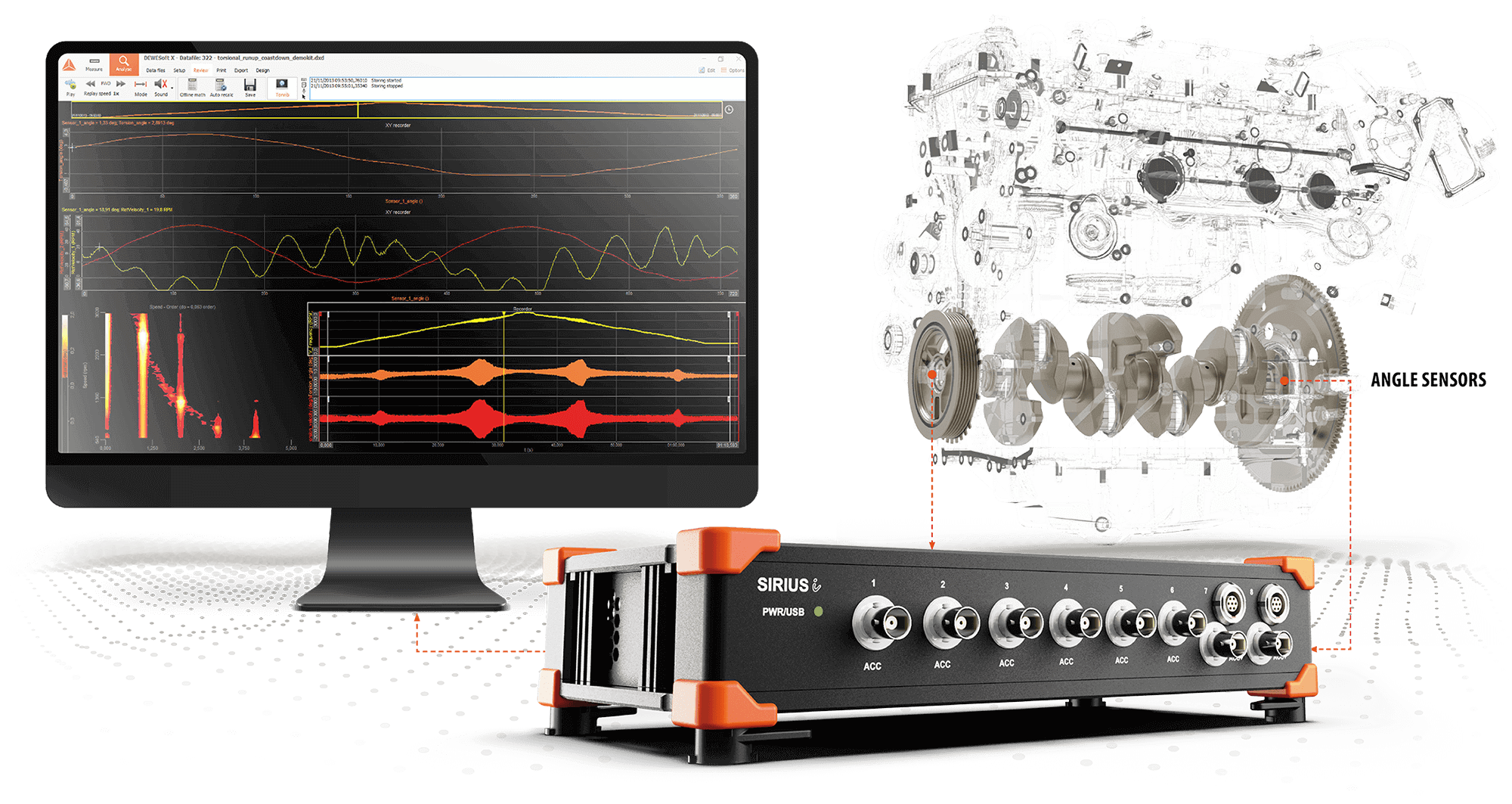
当社のねじり振動解析用データ収録システムは、非常に柔軟なチャネル構成と簡単なセンサ接続を提供します。高度なTEDSセンサのサポートと統合されたスマートDAQテクノロジにより、センサのセットアップとチャネル設定は瞬時に完了し、数分で計測を開始することができます。
収録&解析ソフトウェアDewesoft Xには、ねじり振動用の事前定義された表示がすでに含まれています。
マシンを動かすだけで、データと結果がリアルタイムで画面に表示され始めます。ビジュアル表示は自由に設定でき、オンラインでもオフラインでもいつでも表示を変更できます。シンプルなウェブカメラを接続し、計測データの隣にビデオを同期させることができます。
シンプルな組み込みレポート ツールと豊富なファイル形式エクスポート機能により、PDFレポートを素早く作成したり、必要に応じてExcelやMatlabその他サポートされているSWパッケージにデータをエクスポートして、さらに解析することができます。


ねじり振動と回転振動は、エンコーダセンサ(1回転あたり最大3600パルス)、または分解能は低い(1回転あたり最大720パルス)ものの、標準的なエンコーダを損傷させる可能性のある振動に対してはるかに感度が低い特殊なセンサ(CA-RIE-360/720)のいずれかで計測することができます。
収録&解析ソフトウェアDewesoft X DAQには、いくつかの代表的なセンサがあらかじめ定義されています。センサの種類がリストにない場合は、センサエディタで独自のセンサを定義することもできます。
ねじり振動モジュールの場合、センサはエンコーダまたはCDMタイプでなければならないことに注意してください。
■さまざまな角度センサーがサポートされています。
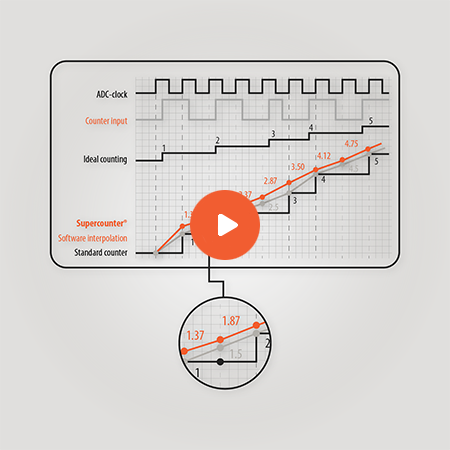
DEWESoftのデータ収録システムはスーパーカウンタと呼ばれる特許および登録商標技術を利用しています。
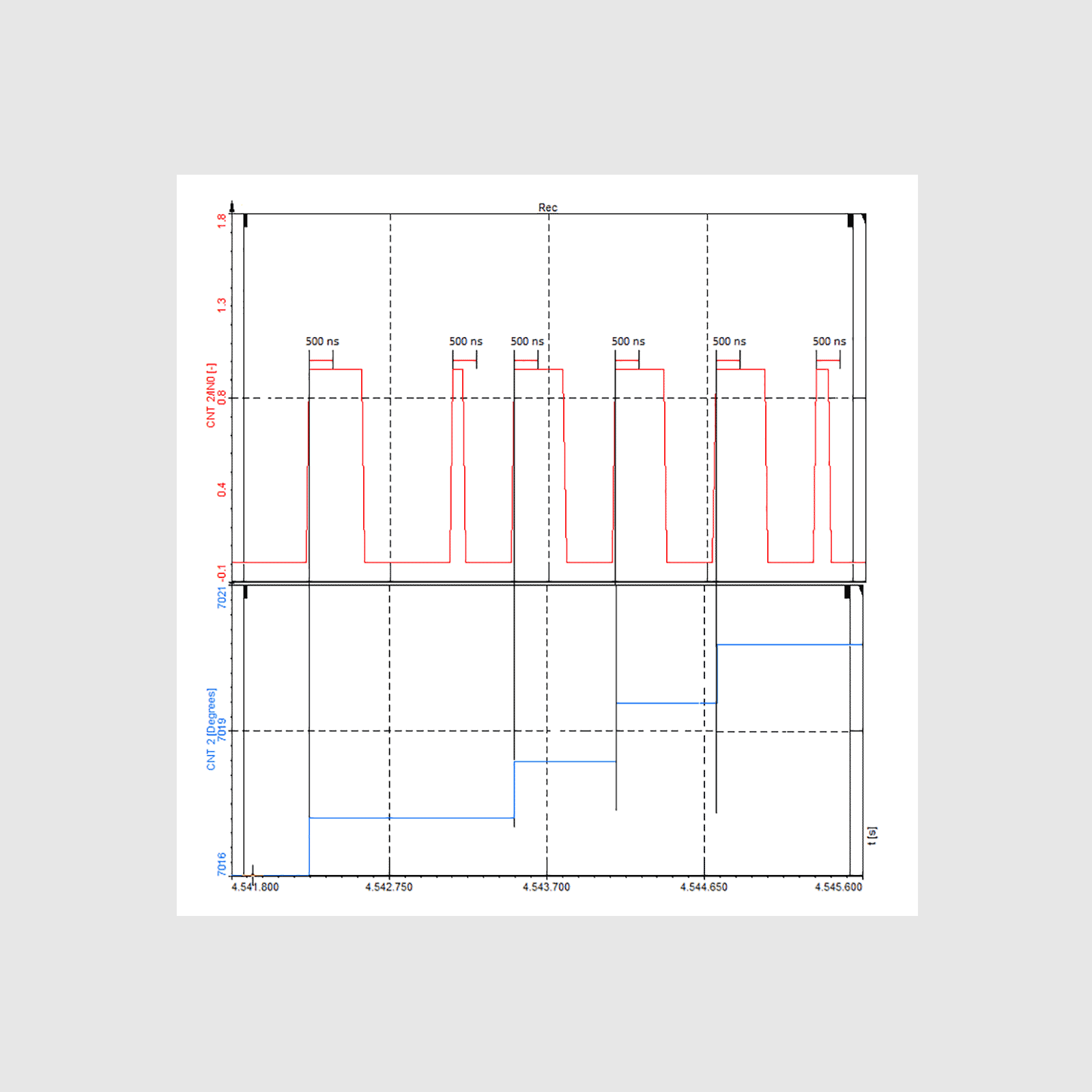
カウンタ入力は、回転機械の回転数と角度を計測できます。1サンプル後の整数値(例えば1,1,2,2,3,4)しか出力しない標準的なカウンタに比べ、DEWESoftのスーパーカウンタ入力は、時間と振幅が完全に同期した1.37,1.87,2.37などの正確な値を抽出することができます。
これは信号の立ち上がりエッジの正確な時間を、追加のカウンタで計測することによって行われます。当社のスーパーカウンタ入力はアナログサンプリングレートに関係なく、102.4MHzのタイムベースで動作します。
カウンタ入力は、アナログ,CANバス,その他のデータソースと完全に同期しており、バランシング,オーダートラッキング,ねじり振動などの簡単なアプリケーションを可能にします。
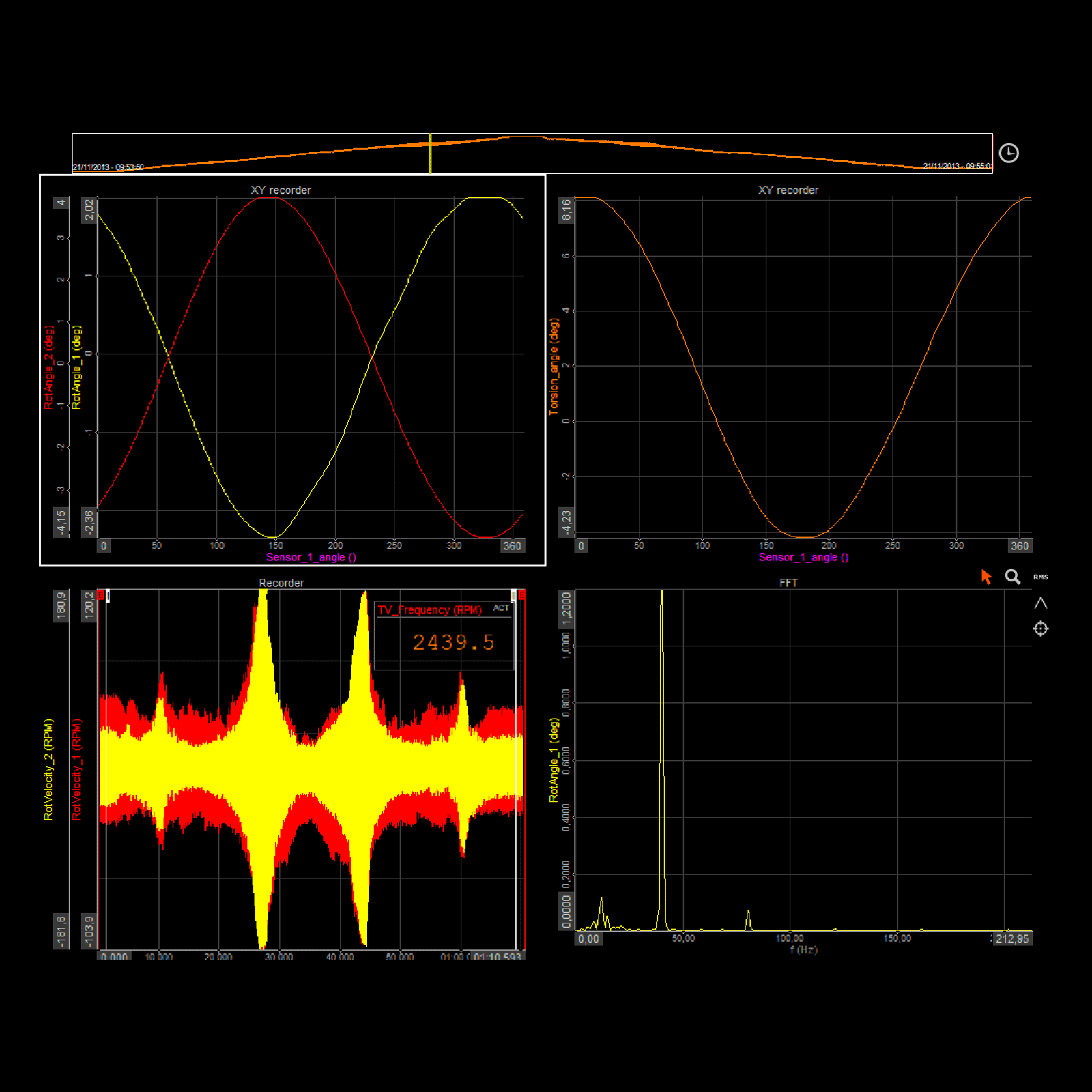
Dewesoft Xのねじり振動モジュールは、いくつかの異なるパラメータを自動的に計算します。 計算はオンラインでリアルタイムに行うことも、保存されたRAWデータをオフラインで行うこともできます。
入力フィルタは、デジタルエンコーダのパルス信号のグリッチやスパイクを防ぐために必要です。
100ns~5usまで設定でき、最適な設定が計算されます。
回転数のDC成分をカットするには、回転DCフィルタを設定する必要があります。必要な周波数をすべて含むようにフィルタを設定する必要がありますが、低すぎないように設定しないと、出力信号に静的なDC偏差が発生します。0.1Hz~10Hzまで設定可能です。最低回転数が除外されないようにする必要があります!
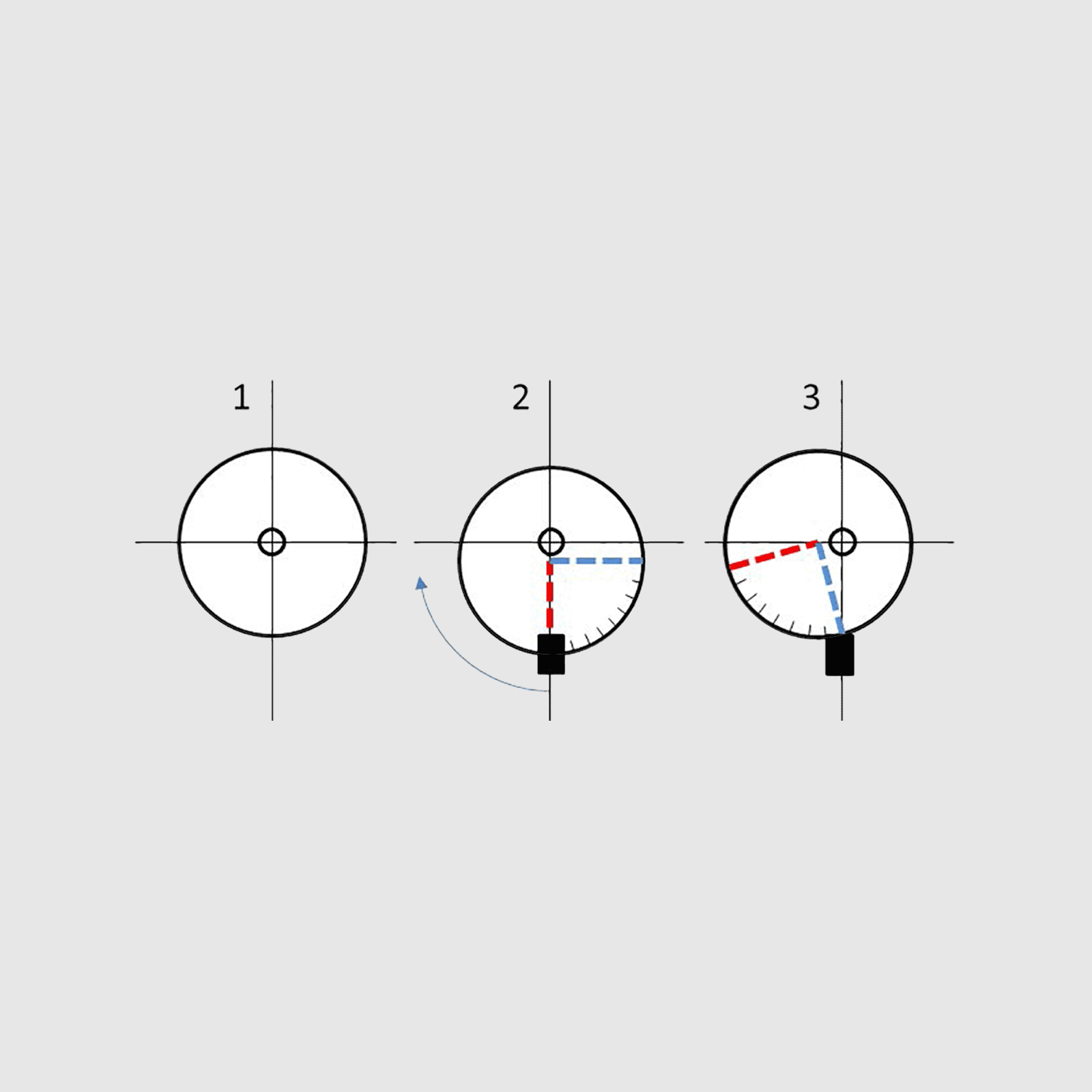
中心に取り付けることは非常に重要です。Dewesoft Xでは、中心から外れた取り付けやエンコーダからの不安定なパルスを、基準曲線を使用して補正できます。
ただし、エンジンから負荷が取り除かれていること、つまりフリーラン状態でなければなりません。そうでなければ、解析したい振動も打ち消してしまうことになります。機械がアイドリング速度で作動し、実際のねじり振動がないときに、「設定」ボタンを押します。

モジュール式データ収録システム

ポータブル 4 チャネル音響振動アナライザ

ポータブルデータ収録システム

8チャネルユニバーサルデータ収録システム

8チャネル USBデータ収録システム
収録解析ソフトウェア
〒331-0814 さいたま市北区東大成町1-497 MJ赤柴ビル6階
copyright© DEWE Japan Co.,Ltd. all rights reserved.
