バランスの取れたローターは、回転機械の円滑な運転には不可欠です。バランスが崩れると大きな振動が発生し、機械の寿命を縮め材料の欠陥の原因となります。DEWESoftのシングルおよびデュアルプレーンバランシングツールは、現場でのアンバランスを解消し、長いダウンタイムを削減するための優れたいツールです。 バランシングソリューションは優れたパフォーマンスを提供します。
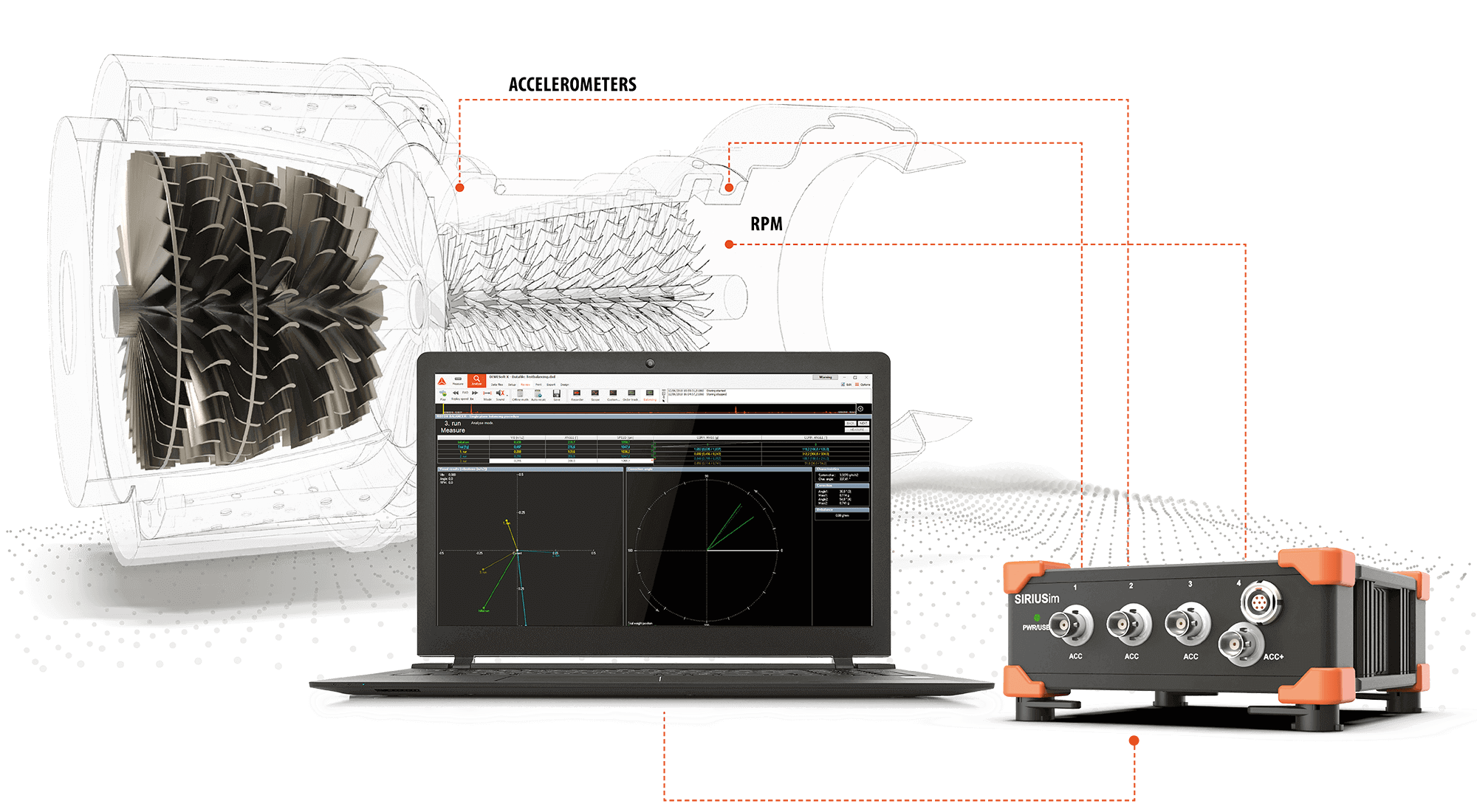

バランスのとれたローターは、ほとんどの回転機械にとって不可欠です。アンバランスは大きな振動を引き起こし、材料の欠陥や寿命を縮めます。ローターのアンバランスは振動の主要な問題であり、始めの次数(回転周波数)に関係します。
バランシングの目的は、始めの次数に関連する振動を最小限に抑えることです。
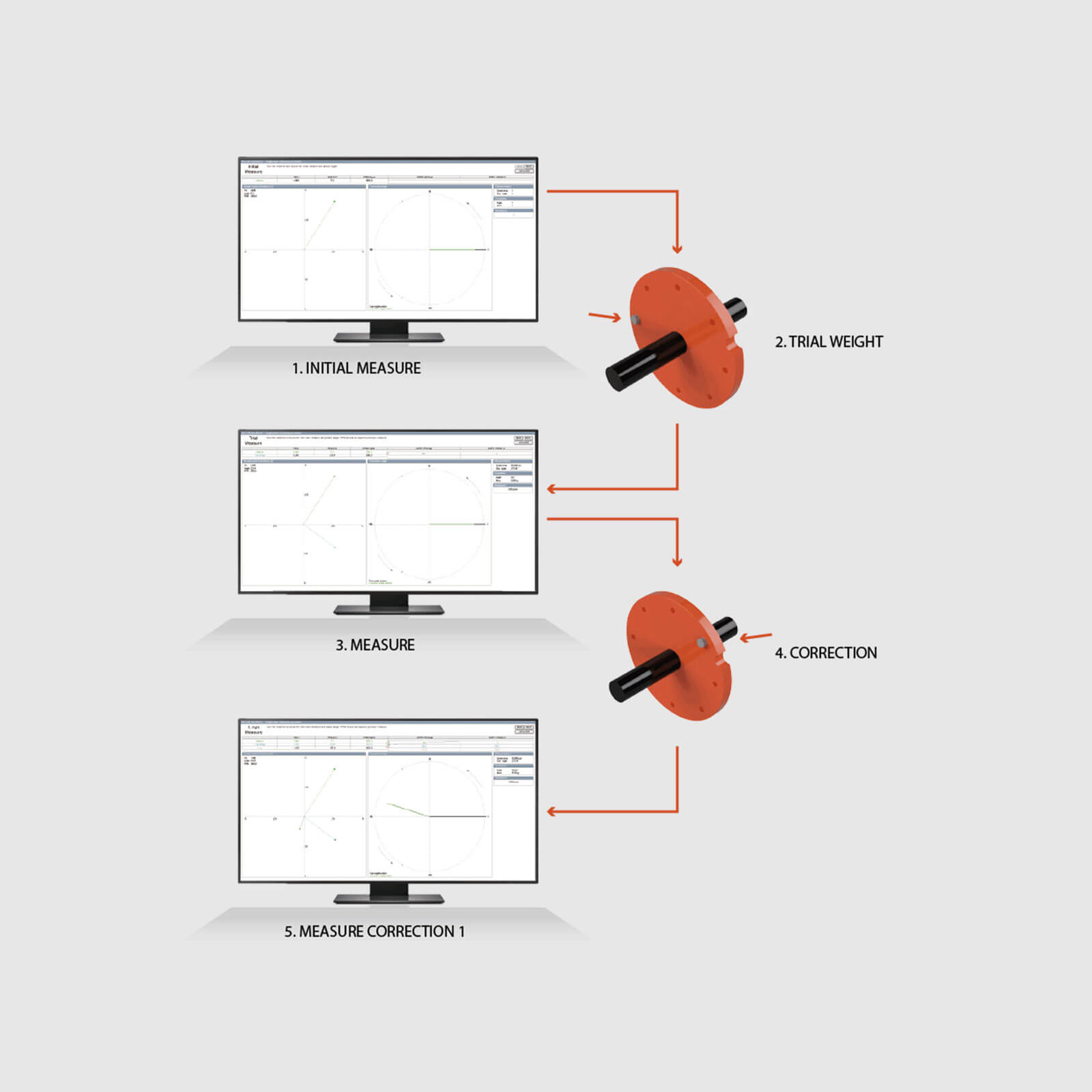
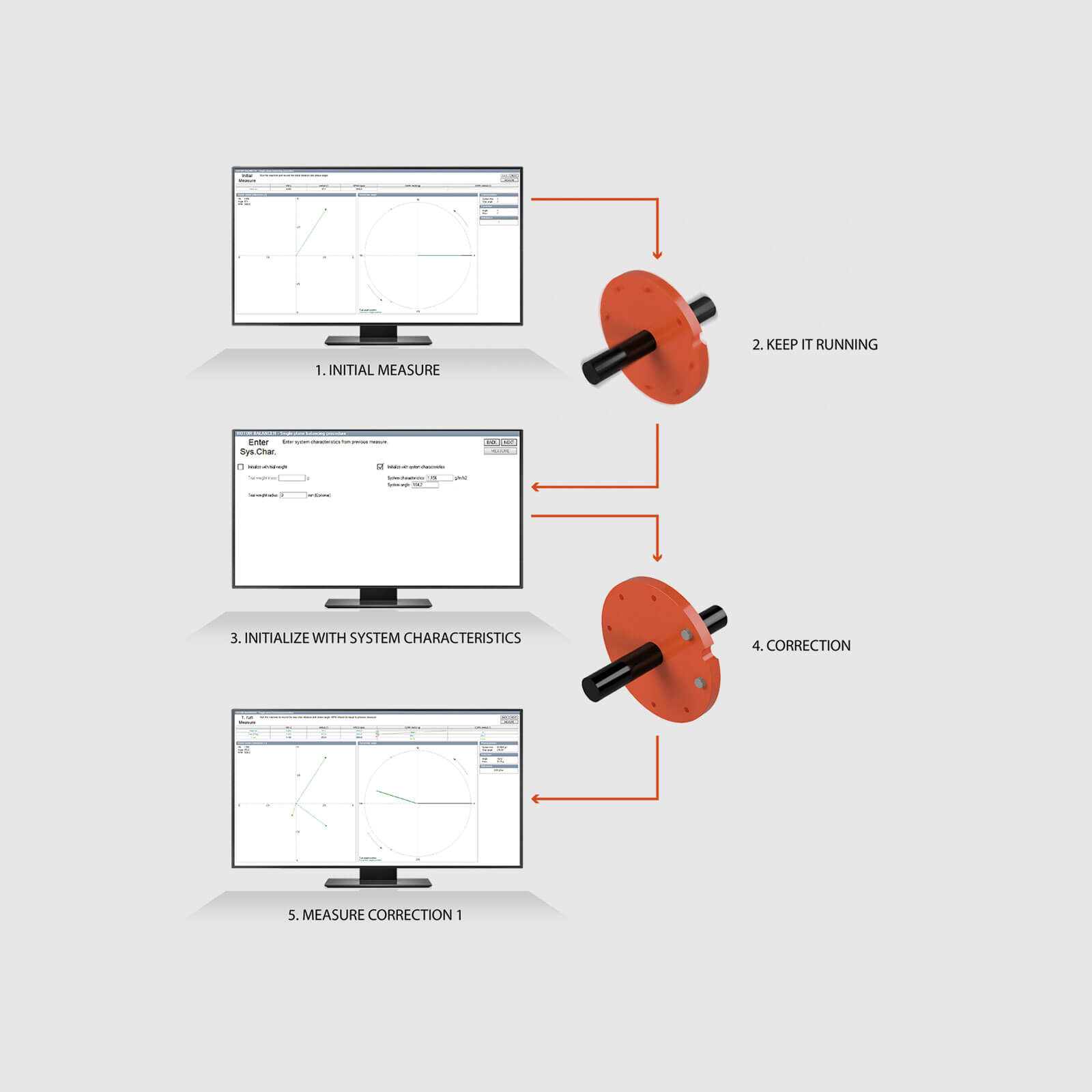
基本的には次のように動作します: 初期状態を計測し、既知の質量の試用ウェイトを加え、カウンタウェイトの位置と質量を計算し、試用ウェイトを取り除き、計算されたウェイトを反対側に置き、アンバランスを解消します。
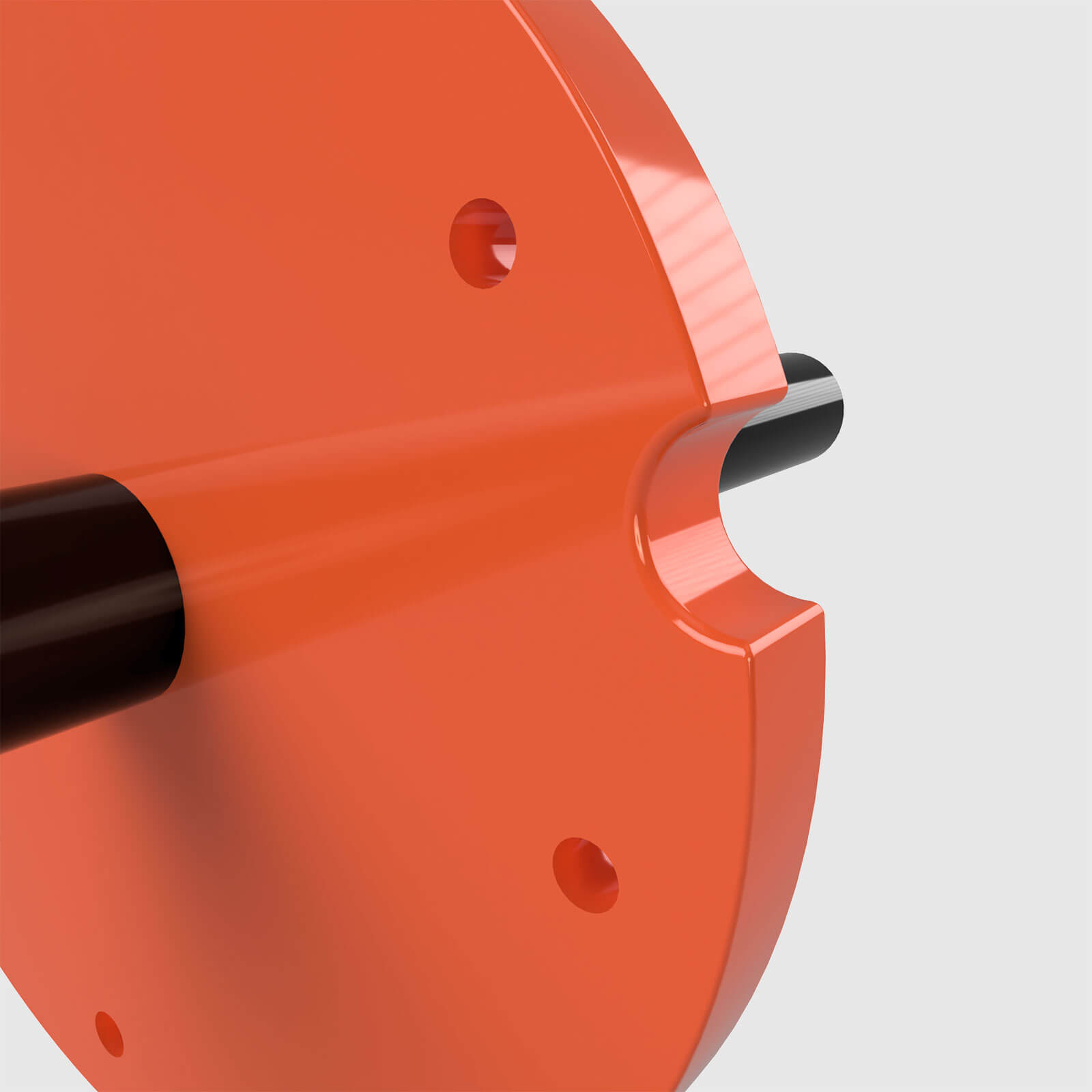
アンバランスが存在する場合、始めの次数(回転周波数)ははっきりとわかります。以下に示すように、ローターには偏った質量の分布が存在します。反対側に補正ウェイトが追加され(あるいは材料が除去され)、主要部分が打ち消されます。
この手順は、納得いくまで繰り返すことができます。
機械によって、シングルまたはデュアルプレーンのバランシングが使用されます。1つのプレーンバランシングと2プレーンバランシングの選択は、一般的に2つの要因によって決まります。要因の1つは、ローターの直径(D)とローターの長さ(L)の比率です。もう1つの要因は、ローターの運転速度です。
回転体ツールのバランシングは、3つの簡単なステップで行います。
必要に応じて、3 つの手順すべてを繰り返します。
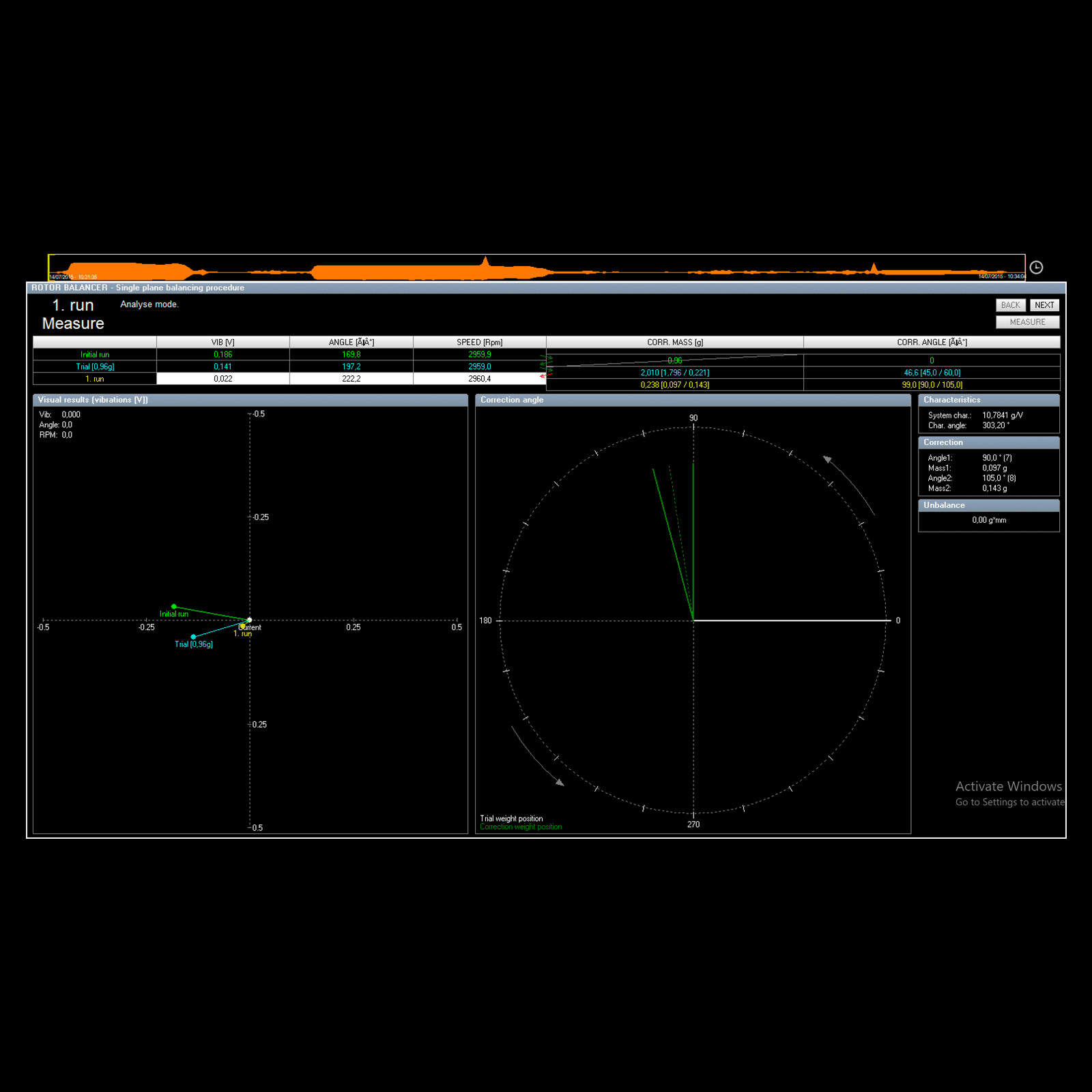
上部の左の画像には現在のステップが表示され、どのアクションを実行しなければならないかの説明があります。
右側にはインタラクティブなボタン「戻る」「次へ」「計測」があります。
各ステップの後、表に結果が表示されます。
極座標プロットは、各運転の振動レベル(振幅と角度)を示します(単位は入力によって異なり、mm/s または mm/s² または g)。
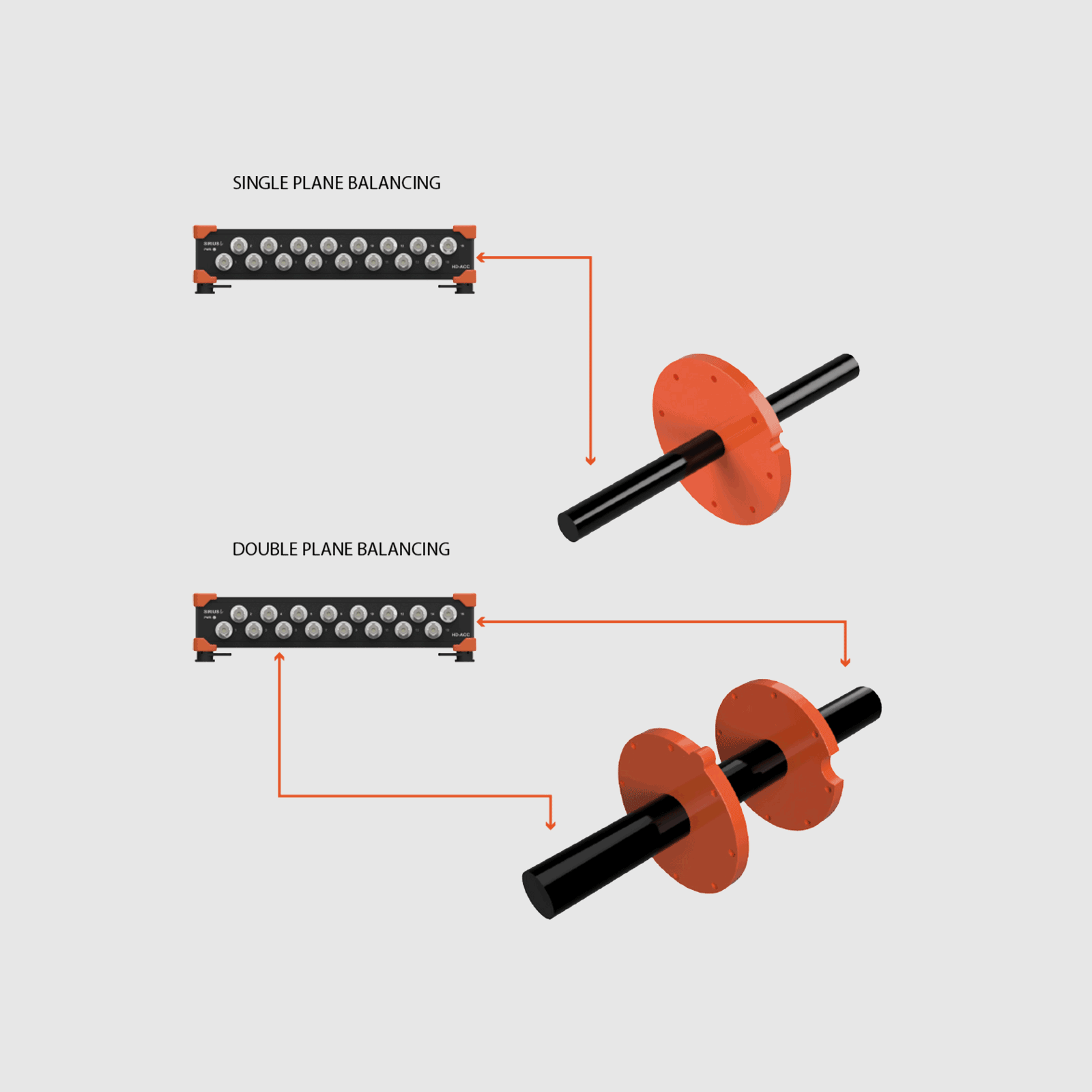
機械によっては、シングルまたはデュアルプレーンバランス調整が必要です。 1プレーンバランシングと2プレーンバランシングの選択は、一般的に次の 2 つの要素によって決まります。
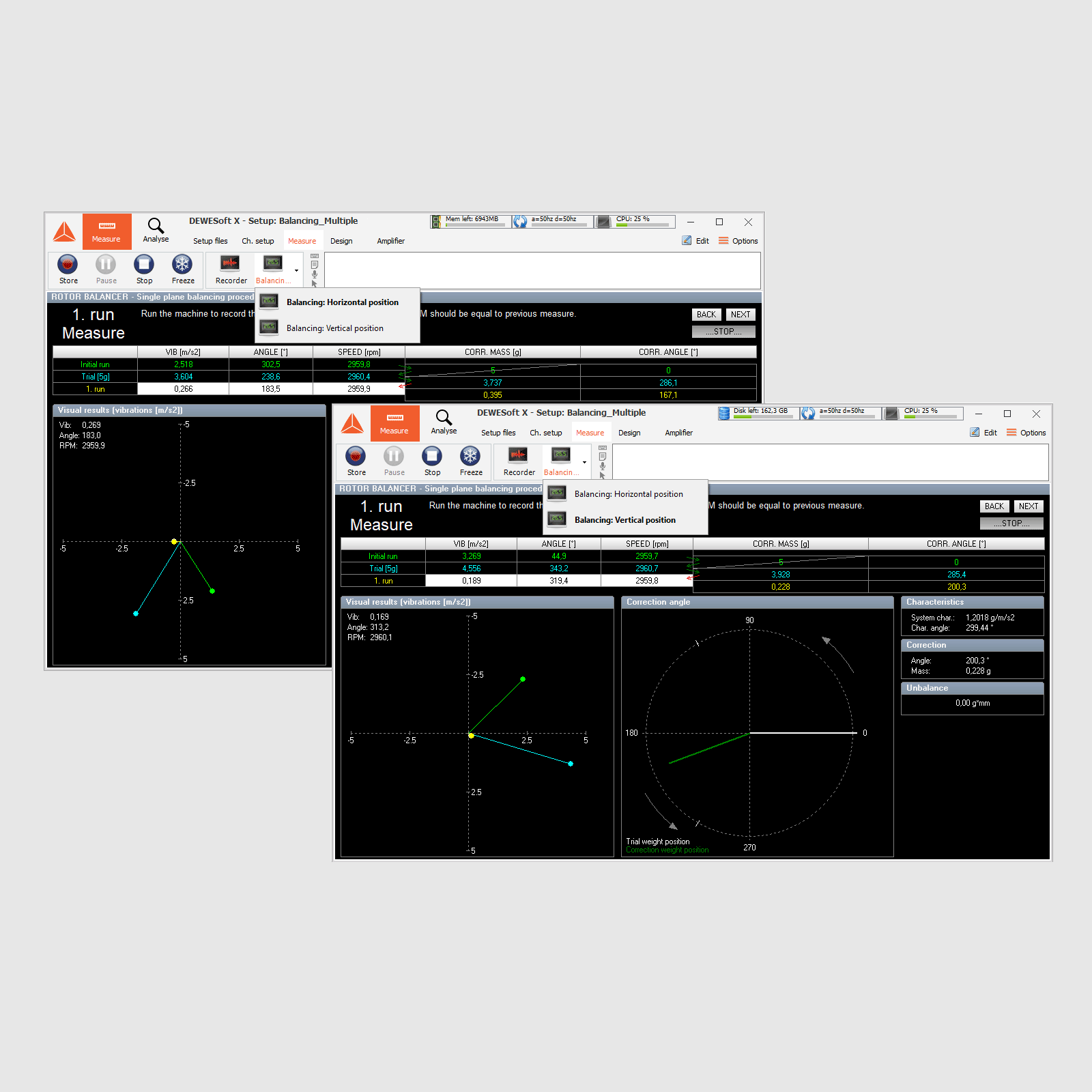
チャネル設定でバランシングモジュールを設定すると、計測モードに「バランシング」という表示が自動生成されます。 これはローターバランサの視覚的なコントロールで、チャネルは演算モジュールから自動的に割り当てられます。
ウェイトを取り付けられるスロット,ブレード,穴の数が決まっているローターや飛行機の場合、絶対角度の代わりに位置番号を把握してウェイトを分割する方がずっと簡単です。
これはプロパティから 「平面 xx を xx に分割」を選択することで実行できます。
信号の振幅と位相が安定しない場合、より良い信号を得るためにはセンサの取り付け場所を変える必要があります。
時間を節約するために複数のセンサを取り付けて一度に計測し、どの信号を取るかを決定できます。
手順はすべて同じですが、1つのVC(ビジュアルコントロール)を操作するだけで、他のすべての機器もそれに続き、異なる結果が得られます。
バランス調整が特定のシャフトですでに行われシステム特性がわかっている場合は、再度試運転を行う必要はありません。代わりにシステム特性パラメータを手動で入力し、補正質量をすぐに計算することができます。
これは、シャフトのバランスを一定の間隔で複数回行う場合に使用できます。システム特性は、質量と振動の関係を表します。

モジュール式データ収録システム

ポータブル 4 チャネル音響振動アナライザ

8チャネル USBデータ収録システム
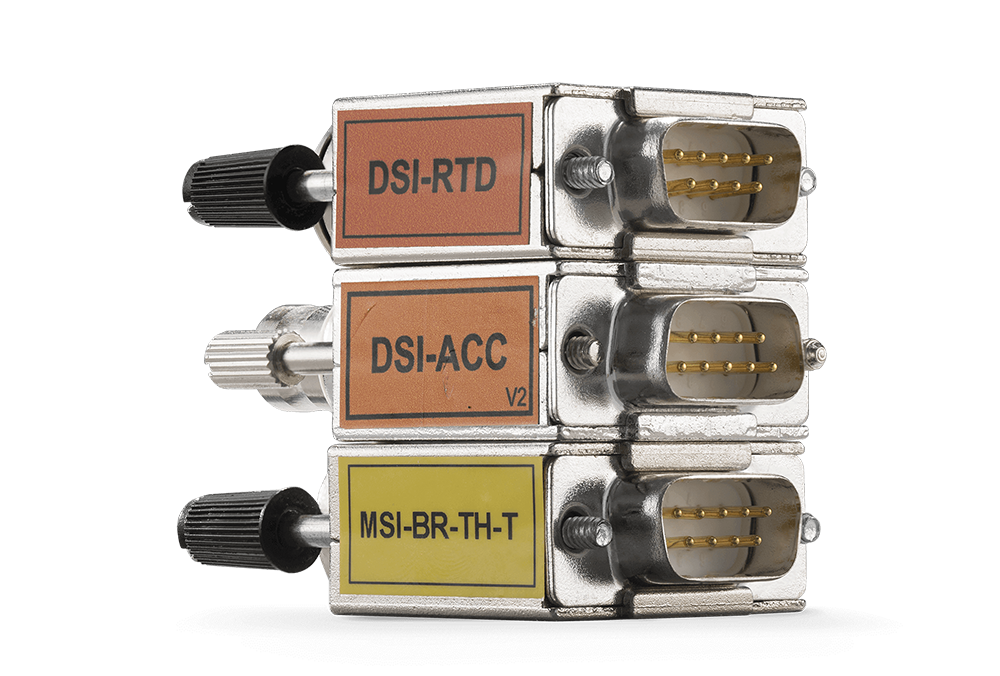
ユニバーサルアンプ用センサアダプタ
収録解析ソフトウェア
〒331-0814 さいたま市北区東大成町1-497 MJ赤柴ビル6階
copyright© DEWE Japan Co.,Ltd. all rights reserved.
